Note
This document describes the procedures for observing with the auxiliary telescope in the early stages of system integration and commission. The procedures are likely to change very rapidly in these stages so it is recommended that users keep a close eye on the document before doing any observations. Here we will also document some troubleshooting to commonly found issues. In case of questions contact the document authors.
1 Introduction¶
It is important to emphasize that this document focus on early operations of the Auxiliary Telescope, with a significant part of the hardware and software still in need of considerable advancements. For instance, we are still in the process of obtaining and validating the telescope pointing model and optical alignment.
There is also some significant distinctions in the way we operate the telescope at this early stages and the way we plan to operate during commissioning and, even more, during normal operations. At this point we maintain a “low-level” kind of operations, both due to the need to be in full control of all the components and simply because the lack of high level operation software available. In fact, we are in the process of developing high level software that will improve considerably the user experience as well as pave the way for the development of “SAL Scripts” that ultimately will power the observatory Script Queue.
Furthermore, some issues pointed in this document may have been corrected in the meantime so it is very likely that the document will contain some outdated information. We will make an effort to document corrections as they occur but be aware that changes may happen faster then we are able to update this document. Users may want to check for more updated versions in the edition navigation page or check the github repository for any pending pull requests.
2 Network architecture and connectivity¶
From the user perspective, the summit network can broken down into two main systems; the campus and the control network. Regardless if you are at the summit, the base or in Tucson if you are connected to the LSST network (e.g. LSST-WAP) you will have access to the summit network. The control network on the other side is only accessible from bastion computers on the summit. These bastions are connected to both the campus network and the control network, thus giving users access to the control network through ssh tunneling.
Attention
An important aspect of the control network is that it does not have access to the internet. This does create some issues, for instance, to update software on computers connected solely to the control network on the fly.
A list of the host computers IP address can be found here.
2.1 Useful ssh Tunneling rules¶
Paste the following rules to ~/.ssh/config on the computer you plan on using for the
observations.
This rule will enable access to a jupyter notebook server. Currently each user is given a jupyter server running on a separate docker container. Each container has it’s own IP address on the control network and each user receive it’s own token to access the server. In the future we will use DM LSP system. Instructions will be updated accordingly.
Host chile-jupyter
Hostname 139.229.162.118
User <username>
LocalForward 8885 192.168.1.2??:8885
This rule will enable connection to the GenericCamera live view server.
Host chile-liveview
Hostname 139.229.162.118
User <username>
LocalForward 8881 192.168.1.218:8888
This rule is to enabled wget on GenericCamera to download fits images.
Warning
This will be deprecated once proper LFA handling is implemented.
Host chile-wget
Hostname 139.229.162.118
User <username>
LocalForward 8001 192.168.1.216:8000
This rule is to connect to the machine that hosts the liveview server (see 6.2 Live view server is not responding).
Host liveview-host
Hostname 139.229.162.114
User <username>
Once the rule is appended to ~/.ssh/config it should be possible to just entry
ssh <Host>. The user will enter the bastion machine specified in the Hostname entry
on the rule and the tunnel specified on LocalForward will be set and the service will
be available on the user localhost:<local-port>. The format of the LocalForward parameter
is <local-port> <remote-host>:<remote-port>. Feel free to change <local-port> to any
suitable range on the machine used for the observations.
It is also possible to send the ssh command to
the background while tunneling by adding the options -N -f.
To log in to the notebook server;
ssh -N -f chile-jupyter
and open the address localhost:8885 on a browser.
To open the liveview;
ssh -N -f chile-liveview
and open the address localhost:8881 on a browser.
To download fits images taken with the Generic Camera;
ssh -N -f chile-wget
wget http://localhost:8001/<image_name>
3 Monitoring and Interactive tools¶
Here is a list of currently available tools to monitor and interact with the system and a quick overview of how to use them. More details on how to perform specific tasks with the telescope are described furthermore.
3.1 Engineering and Facility Database (EFD)¶
The EFD is responsible for listening to and storing all data (Telemetry, Event, Commands and Acknowledgements) sent by components and users interacting with the components. The most recent incarnation of the EFD uses an influx database to store the data in a time-series database. See sqr-034 for details about the EFD implementation.
Data from the summit is available on chronograf and can be accessed at http://summit-chronograf-efd.lsst.codes/.
On the left hand side of the web page there is a tab with links to the different actions one can
perform with chronograf. Probably the two most useful tabs are Dashboards and
Explore; the first will take you to a list of available dashboards created by users that
gathers important information about the subsystems. The “Summary state monitor” is a good
example of general information one would be interested in during an observing night.
Important
The chronograf dashboards are shared between all users. If you feel like you need to make any change to the already existing dashboards, make sure to create a copy of the one you plan on editing and change that one instead.
The Explore tab let users perform free hand queries to the database using a sql-like
language.
3.2 Jupyter Lab Servers¶
Jupyter notebooks are very popular amongst astronomers, specially in the LSST collaboration. They provide an easy and simple way of running Python code interactively through a web browser and give the additional benefit of combining documentation (using markdown language) and code. Users can run Jupyter notebook server locally on their own machine or on servers, enabling a cloud-like environment with access to powerful computing or, in the case of the LSST control system, to specialized functionality.
The most recent incarnation of Jupyter notebooks is Jupyter Labs. It provides access to a similar environment as that of a notebooks but with additional functionality.
We envision that Jupyter Lab servers will be a fundamental part of LSST control system, enabling users to perform low and high level operations in a well-known and interactive environment.
The current system deployment uses individual Jupyter Lab servers for each user running out of individual docker containers. In the nearby future, the plan is to start using DM LSP ([LDM-542]) environment to manage user servers and environment.
The first step to access a Jupyter Lab server is to tunnel using the IP and token information
provided for each user by the Telescope & Site team point of contact. Once the ssh tunnel is
up it should be possible to open a web page on localhost:<local-port>. After entering
the provided token, you should see the Jupyter Lab interface.
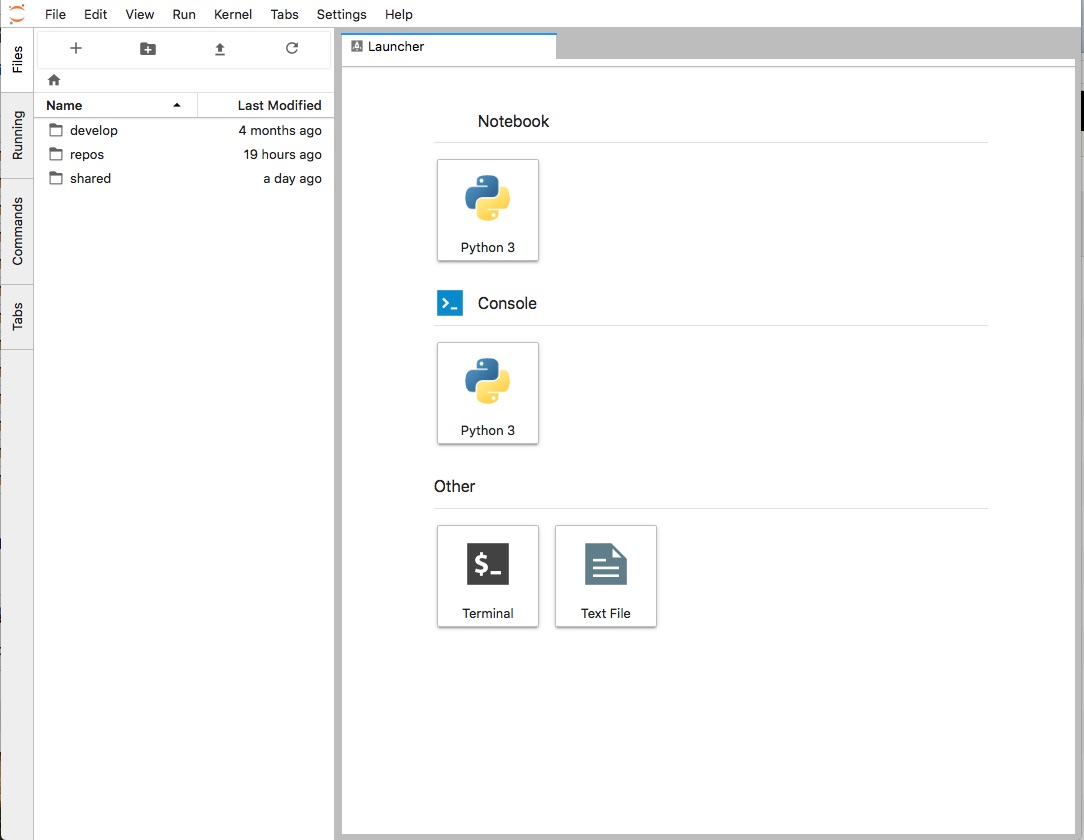
In the left hand there is a file browser navigation screen which, by default, have two directories;
develop and repos. The develop directory is a bind mount on the server that
runs the Jupyter Lab containers. Inside there is a repository for notebooks
(develop/ts_notebooks) with examples and work notebooks from other users (separated by
username). Feel free to browse and edit any notebook within this repo. Be sure to commit and push
any work you may have done and eventually make Pull Request to the original repo so other users can
see and use work that was done.
The repos directory, on the other hand, contains some basic repos that ships with the
container with the T&S software used to power the control system. Any data in this directory,
or in the home folder, will be lost if the container is restarted. It is advisable to only keep
important data inside the user designated folder (e.g. develop).
3.3 LSST Operations and Visualization Environment (LOVE)¶
Note
TBD
3.4 Script Queue¶
Note
TBD
4 Auxiliary Telescope Commandable SAL Components (CSCs)¶
This diagram shows all the CSCs (light blue boxes) that are currently being used at the summit, their connections, the users jupyter servers and the salkafka producer that is responsible for capturing all SAL traffic, serialize it in avro an send it over to kafka to be inserted on the influx database (see sqr-034 for more information about the EFD).

5 Basic Operations Procedures¶
This section explains how one can perform the basic operations with the telescope using the Jupyter Lab server. Here we assume you was able to login to the server assigned to you and either open an existing notebook or create an empty one to work with.
Important
You will noticed that most of the tasks shown here will have two ways of being performed, using the high level software and low level software. At the time of this writing the low level controls, where the user sends commands to individual CSCs and have little feed back, are the only ones tested on sky. The high level operations, as one can see, provides a much easier way to execute these operations, but have not been sanctioned yet.
Note
Notebooks with the procedures can be found on the develop/ts_notebooks/examples
folder.
5.1 Startup procedure¶
At the end of the day, before observations starts, most CSCs will be unconfigured and
in STANDBY state. The first step in starting up the system is to enable all CSCs.
Putting a CSC in the ENABLED state required the transition from STANDBY to
DISABLED and then from DISABLED to ENABLED. When transitioning from
STANDBY to DISABLED it is possible to provide a settingsToApply that selects
a configuration for the CSC. Some CSCs won’t need any settings while others will.
It is possible to check what are the available settings by looking at the settingVersions
event.
After all CSCs are in the ENABLED state, we proceed to open the dome slit, setup the
ATPneumatics and startup the ATAOS. After the dome has finished opening, the telescope
covers are opened and the procedure is complete.
Note
In some cases, if the dome controller is restarted, the dome will need to be homed. At the time of this writing there is no fixture that allow the procedure to be executed without human intervention. The process is documented in 6 Troubleshooting.
The startup procedure is encapsulated in the task startup() from the ATTCS class provided
by ts_standardscript, which is available in the Jupyter server. The high level operation can be
run by doing the following:
from lsst.ts.standardscripts.auxtel.attcs import ATTCS
attcs = ATTCS()
await attcs.start_task
settings = {"atdome": "test.yaml":, "ataos" : "measured_20190908.yaml", "athexapod": "Default1"}
await attcs.startup(settings)
Although this procedure implements all the basic steps and checks, it has not been tested at the telescope yet. For now the sanctioned procedure is to execute this series of commands on a jupyter notebooks. This is ta
from lsst.ts import salobj
Setup remotes for all the AT components
d = salobj.Domain()
atmcs = salobj.Remote(d, "ATMCS")
atptg = salobj.Remote(d, "ATPtg")
ataos = salobj.Remote(d, "ATAOS")
atpne = salobj.Remote(d, "ATPneumatics")
athex = salobj.Remote(d, "ATHexapod")
atdome = salobj.Remote(d, "ATDome", index=1)
atdomtraj = salobj.Remote(d, "ATDomeTrajectory")
await asyncio.gather(atmcs.start_task,
atptg.start_task,
ataos.start_task,
atpne.start_task,
athex.start_task,
atdome.start_task,
atdomtraj.start_task)
Enable all components.
await asyncio.gather(salobj.set_summary_state(atmcs, salobj.State.ENABLED, timeout=120),
salobj.set_summary_state(atptg, salobj.State.ENABLED),
salobj.set_summary_state(ataos, salobj.State.ENABLED, settingsToApply="measured_20190908.yaml"),
salobj.set_summary_state(atpne, salobj.State.ENABLED),
salobj.set_summary_state(athex, salobj.State.ENABLED, settingsToApply="Default1"),
salobj.set_summary_state(atdome, salobj.State.ENABLED, settingsToApply="test.yaml"),
salobj.set_summary_state(atdomtraj, salobj.State.ENABLED))
Open dome shutter
await atdome.cmd_moveShutterMainDoor.set_start(open=True)
Wait until the dome in fully open, then execute the next step to open the telescope cover
await atpne.cmd_openM1Cover.start()
Finally, enable the ATAOS correction for the M1 pressure.
await ataos.cmd_enableCorrection.set_start(m1=True)
If the dome needs to be homed then run the following command:
await atdome.cmd_homeAzimuth.start()
5.2 Pointing¶
The action of pointing and start tracking involves sending a command to the pointing component
(ATPtg) and then waiting for the telescope and dome to be in position while making sure
all components remain in ENABLED state.
When using the ATTCS class it is possible to perform the task with the following set of
commands:
import asyncio
import astropy.units as u
from astropy.time import Time
from astropy.coordinates import ICRS, Angle
from lsst.ts.standardscripts.auxtel.attcs import ATTCS
Initializing ATTCS class.
attcs = ATTCS()
await attcs.start_task
Run the slew task. This task will only finish when the telescope and the dome are positioned. Also, this will set the sky position angle (angle between y-axis and North) to be zero (or 180. if zero is not achievable). It is posssible to user RA/Dec and rotator as hexagesimal strings or floats (and mix and match them). For instance,
await attcs.slew_icrs(ra="20:25:38.85705", dec="-56:44:06.3230", sky_pos=0., target_name="Alf Pav")
or
await attcs.slew_icrs(ra=20.42746, dec=-56.73508, sky_pos=0., target_name="Alf Pav")
It is also possible to slew to an RA/Dec target and request a rotator position. To do that use the
rot_pos argument instead of sky_pos. Note that this will request rot_pos at the
requested time, which will change as the telescope track the object.
await attcs.slew_icrs(ra="20:25:38.85705", dec="-56:44:06.3230", rot_pos=0., target_name="Alf Pav")
As with the 5.1 Startup procedure procedure, this task has not been tested at the telescope yet. For now the sanctioned procedure is to execute the slew and track by commanding the pointing component individually. This also means the user have to handle the rotator angle computations. In this mode we only support setting the rotator position to a certain angle. Due to some binding issues we have been trying to keep the rotator as close to zero as possible.
import logging
import yaml
import numpy as np
from matplotlib import pyplot as plt
import astropy.units as u
from astropy.time import Time
from astropy.coordinates import AltAz, ICRS, EarthLocation, Angle, FK5
import asyncio
from lsst.ts import salobj
from lsst.ts.idl.enums import ATPtg
from astropy.utils import iers
iers.conf.auto_download = False
d = salobj.Domain()
atmcs = salobj.Remote(d, "ATMCS")
atptg = salobj.Remote(d, "ATPtg")
ataos = salobj.Remote(d, "ATAOS")
atpne = salobj.Remote(d, "ATPneumatics")
athex = salobj.Remote(d, "ATHexapod")
atdome = salobj.Remote(d, "ATDome", index=1)
atdomtraj = salobj.Remote(d, "ATDomeTrajectory")
await asyncio.gather(atmcs.start_task,
atptg.start_task,
ataos.start_task,
atpne.start_task,
athex.start_task,
atdome.start_task,
atdomtraj.start_task)
The next cell sets the observatory location. This is needed to compute the Az/El of the target to set the camera rotation angle. We are trying to keep the angle close to zero.
location = EarthLocation.from_geodetic(lon=-70.747698*u.deg,
lat=-30.244728*u.deg,
height=2663.0*u.m)
This next cell defines a target.
ra = Angle("20:25:38.85705", unit=u.hour)
dec = Angle("-56:44:06.3230", unit=u.deg)
target_name="Alf PAv"
radec = ICRS(ra, dec)
This next cell will slew to the target and set the camera rotation angle
to zero. Not that, unlike attcs.slew_icrs this call returns right away and does not
provide any feedback of when the telescope and dome arrives at the requested position.
# Figure out what is the rotPA that sets nasmith rotator close to zero.
time_data = await atptg.tel_timeAndDate.next(flush=True, timeout=2)
curr_time_atptg = Time(time_data.tai, format="mjd", scale="tai")
print(curr_time_atptg)
coord_frame_altaz = AltAz(location=location, obstime=curr_time_atptg)
alt_az = radec.transform_to(coord_frame_altaz)
await atptg.cmd_raDecTarget.set_start(
targetName=target_name,
targetInstance=ATPtg.TargetInstances.CURRENT,
frame=ATPtg.CoordFrame.ICRS,
epoch=2000, # should be ignored: no parallax or proper motion
equinox=2000, # should be ignored for ICRS
ra=radec.ra.hour,
declination=radec.dec.deg,
parallax=0,
pmRA=0,
pmDec=0,
rv=0,
dRA=0,
dDec=0,
rotPA=180.-alt_az.alt.deg,
rotFrame=ATPtg.RotFrame.FIXED,
rotMode=ATPtg.RotMode.FIELD,
timeout=10
)
In case you need to stop tracking, use the next cell!
await atptg.cmd_stopTracking.start(timeout=10)
Use the next cell in case you need to offset to center the target on the FoV.
This will set total offsets. So, if you say el=0 and az=-30 and
then later you do el=30 and az=0., it will reset the offset in
azimuth to zero and make an offset of 30arcs in elevation.
await atptg.cmd_offsetAzEl.set_start(el=0.,
az=-100.,
num=0)
If you want to make persistent offsets you can use the following method.
await atptg.cmd_offsetAzEl.set_start(el=0.,
az=-100.,
num=1)
If you want to add your offset to a pointing model file, do the following.
await atptg.cmd_pointNewFile.start()
await asyncio.sleep(1.)
await atptg.cmd_pointAddData.start()
await asyncio.sleep(1.)
await atptg.cmd_pointCloseFile.start()
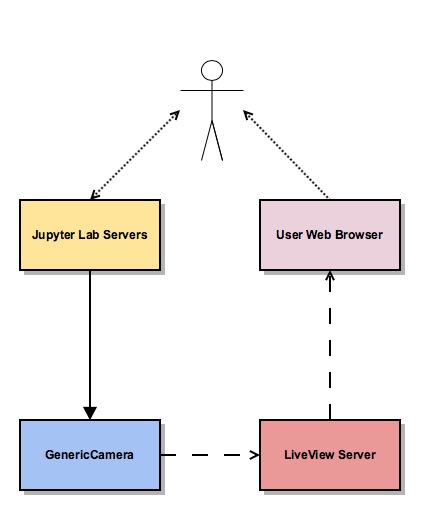
5.3 Using GenericCamera Liveview¶
The GenericCamera liveview mode can be used for quick look of telescope pointing, to check that a target is centered on the field after a slew was performed or to quickly evaluate the optics. When liveview mode is activated, the GenericCamera CSC will start a web server and start streaming the images taken with the selected exposure time. To visualize the images streamed by the CSC we created a separate web server that connects to the CSC stream and display the images. This is illustrated in the following diagram.
This is how to start live view in the GenericCamera;
from lsst.ts import salobj
import asyncio
d = salobj.Domain()
r = salobj.Remote(d, "GenericCamera", 1)
await r.start_task
Before starting live view, make sure to enable the CSC with the 4x4 binning settings.
await salobj.set_summary_state(r, salobj.State.ENABLED, settingsToApply="zwo_4x4.yaml")
When starting live view mode the user must specify the exposure time, which also sets the frame rate of the stream. So far, we have tested this with up to 0.25s exposure times.
await r.cmd_startLiveView.set_start(expTime=0.5)
Once live view has started, make sure you have the live view ssh rule running,
then you should be able to access the live view server by opening localhost:8881 on a
browser.
Attention
The web server that streams the live view data is not in a stable state. If the browser is not loading the page you may have to check the process running the live view server and restart it. Check the 6 Troubleshooting session for more information about how to restart it.
To stop live view, you just need to run the following command.
await r.cmd_stopLiveView.start(timeout=10)
5.4 Using GenericCamera to take (fits) images¶
The GenericCamera CSC was designed to emulate the same behaviour as that of the ATCamera and MTCamera CSCs. That means the commands and events have the same name and, as much as possible, the same payload and the events marking the different stages of image acquisition are also published at approximately the same stages.
To take an image with the GenericCamera first make sure that live view is not running. If live view is running the take image command will be rejected. Then, to take an image:
r.evt_endReadout.flush()
await r.cmd_takeImages.set_start(numImages=1,
expTime=10.,
shutter=True,
imageSequenceName='alf_pav'
)
end_readout = await r.evt_endReadout.next(flush=False, timeout=5.)
print(end_readout.imageName)
You can download the image on your notebook server using the following command;
import wget
filename = wget.download(f"http://192.168.1.216:8000/{end_readout.imageName}.fits")
Note that this only works from the Jupyter notebook server as it is connected to the control network.
You can download the image produced by the command above on your local computer
by running the following wget on the command line (make sure the
chile-wget ssh rule is running).
wget http://localhost:8001/<image_name>
6 Troubleshooting¶
Here we describe some of the currently known issues and how to resolve them.
6.1 ATMCS won’t get out of FAULT State¶
In some situations the ATMCS will go to FAULT state and it will reject the standby command,
preventing to recover the system. We have been working on tracking this issue down but,
should you encounter this issue it is possible to recover by pressing the e-stop button on
the main cabinet (close to the telescope pier) and on the dome cabinet (east building wall on lower
level) and then executing the recover procedure.
To recover from e-stop, release both e-stop buttons, press and hold the “start” button on the
dome cabinet for five seconds, then press and hold the “start” button on the main cabinet for
5s. This should clear the FAULT state and leave the ATMCS in STANDBY.
6.2 Live view server is not responding¶
The live view server that is responsible for receiving images from the GenericCamera and streaming it to a user we browser is still in a very rough shape. The server connect to the GenericCamera over a TCP/IP socket and provides an image streaming server using a simple tornado web server. The connector that is responsible for receiving images from the CSC is still not capable of handling a dropped connection. That means, if there is a connection issue it is not capable of regenerating and continuing operations. Moreover, if the liveview mode is switched off on the CSC, the connection is also dropped and the live view server is also not capable of reconnecting.
If any of this happens the easiest solution is to restart the live view server. For that, you will need to connect to the container running the liveview server, kill the running procedure and restarting the process. This can be summarized as follows;
ssh liveview-host
docker attach gencam_lv_server
python liveview_server.py
Once the live view server is running you can detach from the container by doing Crtl+p Crtl+q.
6.3 Building CSC interfaces¶
To communicate with a CSC, we use a class provided by salobj called Remote.
As you can see on previous sessions, the Remote receives the name of the CSC as
an argument, which ultimately, specifies the interface to load.
In order for the Remote to load this interface it needs to have the set of
idl libraries available. In some cases, the interface for the CSC that you plan
on communicating may no be readily available on the Jupyter notebook server. If
this is the case you will see an exception like the following when trying to
create the Remote.
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
<ipython-input-2-470a83f93eee> in <module>
----> 1 r = salobj.Remote(salobj.Domain(), "Component")
~/repos/ts_salobj/python/lsst/ts/salobj/remote.py in __init__(self, domain, name, index, readonly, include, exclude, evt_max_history, tel_max_history, start)
137 raise TypeError(f"domain {domain!r} must be an lsst.ts.salobj.Domain")
138
--> 139 salinfo = SalInfo(domain=domain, name=name, index=index)
140 self.salinfo = salinfo
141
~/repos/ts_salobj/python/lsst/ts/salobj/sal_info.py in __init__(self, domain, name, index)
152 self.idl_loc = domain.idl_dir / f"sal_revCoded_{self.name}.idl"
153 if not self.idl_loc.is_file():
--> 154 raise RuntimeError(f"Cannot find IDL file {self.idl_loc} for name={self.name!r}")
155 self.parse_idl()
156 self.ackcmd_type = ddsutil.get_dds_classes_from_idl(self.idl_loc, f"{self.name}::ackcmd")
RuntimeError: Cannot find IDL file /home/saluser/repos/ts_idl/idl/sal_revCoded_Component.idl for name='Component'
But, instead of Component it will be the name of the CSC you tried to connect to.
To resolve this issue, you will need to build the libraries. You can do that by putting the
following commands on a notebook cell:
%%script bash
make_idl_files.py <Component>
Again, you will need to replace <Component> by the name of the CSC.